團隊簡介
77779193永利官网特種智能裝備關鍵技術研究團隊重點針對管道、油罐、空中、野外以及易燃易爆等特種作業環境下自動化裝備與特種機器人設計及應用等方面存在的相關問題,開展的機器人的構型與自動化裝備結構設計;在研究其運動學、動力學特性的基礎上,開展智能控制的理論和方法研究,同時對機器視覺與人工智能基礎理論和技術進行深入研究,并與自動化裝備和機器人技術進行深度融合,在特種智能裝備結構設計、運動學、動力學、多目标視覺跟蹤技術、三維點雲與二維圖像融合技術等方面形成了一定的優勢與特色。
團隊固定人員共有3人,其中教授1人,副教授、講師等科研人員各1人。現有在讀研究生17名。先後獲得了國家自然科學基金面上項目和應急項目、科技支撐計劃計劃、省自然科學基金面上項目、省科技廳國際科技合作項目等的資助,同時,和科研院所及國有大中型合作項目超過30餘項,具有從事特種智能裝備關鍵技術的基礎研究條件。
近五年研究團隊已發表論文30餘篇,包括Journal of Magnetics 、Review of Scientific Instruments、Complexity、International Journal of Advanced Robotic Systems 、Advanced Engineering Science、Chinese Journal of Mechanical Engineering、Journal of Zhejiang University (Engineering Science)、International Journal of Distributed Sensor Networks、強激光與粒子束、儀器儀表學報、工程設計學報、機械科學與技術、機械設計與制造等國内外權威或核心期刊。研究成果獲得湖北省科技進步二等獎3項(第一單位)、湖北省科技進步三等獎1項(第一單位)、武漢市科技進步二等獎1項(第一單位)。授權發明專利20餘項。
成員介紹
負責人:
張铮,男,工學博士,教授,主要從事特種智能裝備設計、智能控制與檢測、機電一體化技術、無線傳感器網絡、機器人技術、設備的智能故障診斷與監測方面教學和科研工作。主持完成國家自然基金1項、省科技廳國際科技合作項目和教育廳重點項目各1項,主持完成橫向科研項目10餘項,主持項目到賬經費合計300萬元,獲湖北省科技進步二等獎3項。發表學術論文70餘篇,被SCI、EI收錄30餘篇。授權發明專利10餘項、軟件著作權9項。
成員:

張铮 教授/博士 1970年3月 |

徐顯金 副教授/博士 1971年10月 |

汪威 講師/博士 1975年10月 |
主要科研成果及項目
| 序号 |
項目名稱 |
項目來源 |
負責人 |
到帳金額 |
起止年月 |
| 1 |
聚氨酯材料成型裝備關鍵技術及應用 |
湖北省科技進步二等獎 |
張铮 |
|
2015.8 |
| 2 |
快速高精3D打印關鍵技術研究及産業化 |
湖北省科技進步二等獎 |
張铮 |
|
2020.12 |
| 3 |
面向汽車電子組件的視覺引導智能裝配關鍵技術與應用 |
湖北省科技進步二等獎 |
汪威 |
|
2018.12 |
| 4 |
複雜異型紙盒智能成型關鍵技術及應用 |
湖北省科技進步三等獎 |
徐顯金 |
|
2018.12 |
| 5 |
高壓直流輸電線路磁懸浮巡檢機器人的關鍵技術研究 |
國家自然科學基金 |
徐顯金 |
80萬 |
2014.01-2017.12 |
| 6 |
基于UWB和開窗時間反演的室内WSN高精度節點定位方法研究 |
國家自然科學基金 |
張铮 |
19.6萬 |
2016.1-2016.12 |
| 7 |
架空高壓直流輸電線路磁懸浮巡檢機器人 |
湖北省科技支撐計劃 |
徐顯金 |
50萬 |
2015.01-2017.12 |
| 8 |
農業CNC自動化系統研發 |
湖北省科技支撐計劃 |
徐顯金 |
50萬 |
2015.01-2017.12 |
| 9 |
室内WSN節點協同定位理論與目标跟蹤方法 |
湖北省科技廳國際科技合作項目 |
張铮 |
10萬 |
2013.1-2014.1 |
| 10 |
多目視覺引導機器人絕對定位技術的研究 |
省自然科學基金面上項目 |
汪威 |
3萬 |
2016.9-2018.12 |
| 11 |
高燃速藥柱自動整形裝備研究 |
内蒙古合成化工研究所 |
張铮 |
75萬 |
2019.12-2020.12 |
| 12 |
機器人本體設計與加工 |
海軍工程大學 |
張铮 |
88.2萬 |
2020.9-2021.12 |
| 13 |
基于弱剛性大時延主從控制算法配電網帶電作業機器人研制 |
國網湖南電力有限公司檢修公司 |
徐顯金 |
16.5萬 |
2019.01-2020.12 |
| 14 |
視覺定位激光打标系統 |
武漢歐雙光電科技有限公司 |
汪威 |
21萬 |
2017.12-2019.11 |
| 15 |
3D AOI技術研發與應用 |
深圳市為德訊科技有限公司 |
汪威 |
30萬 |
2021.9- |
| 16 |
頭枕發泡機控制系統技術開發 |
興橋高分子材料科技有限公司 |
張铮 |
19.6萬 |
2013.2-2014.4 |
| 17 |
湖北宏錦汽車内飾件股份有限公司77779193永利官网産學研協議 |
湖北宏錦汽車内飾件股份有限公司 |
張铮 |
10萬 |
2017.7-2018.10 |
| 18 |
安瓿水針劑自動燈檢機研究開發 |
湖北武當動物藥業有限公司 |
汪威 |
23萬 |
2013.4-2014.10 |
| 19 |
智能公共自行車的車載控制器研發 |
北京途自在物聯科技有限公司 |
張铮 |
12萬 |
2016.8-2017.8 |
| 20 |
5G天線總檢設備開發 |
武漢虹信科技發展有限責任公司 |
汪威 |
58萬 |
2020.9-2021.9 |
團隊照片展示

科研成果
1.基于UWB和開窗時間反演的室内WSN高精度節點定位方法研究
本項目的主要針對室内無線傳感器節點定位精度不足難以滿足工程需求的問題,采用時間反演理論和TOA節點測距原理,在研究超寬帶(UWB)通信技術較強的多徑分辨能力和時間反演理論的時空聚焦特性的基礎上,分析了窗口的位置及窗口寬度對聚焦波形和聚焦時間的影響規律,确定了時間窗口參數調整對多徑信号分離的方法,研究了基于接收信号能量和波形特征的 LOS/NLOS 信标節點感知方法和基于UWB時間反演的障礙物材質識别及測距誤差校正方法,完成了高精度室内節點定位原型系統設計研究結果表明開窗時間反演的超寬帶TOA 測距方法,提高了室内WSN測距精度。
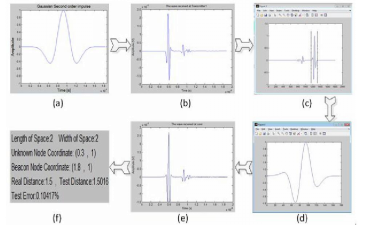
基于時間反演的節點測距過程
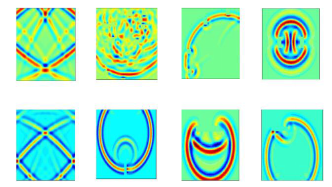
電磁波在室内環境下的傳播仿真
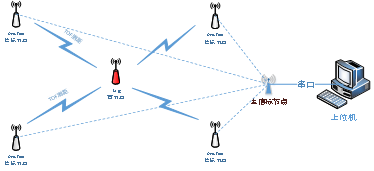
室内 UWB 精确定位系統平台
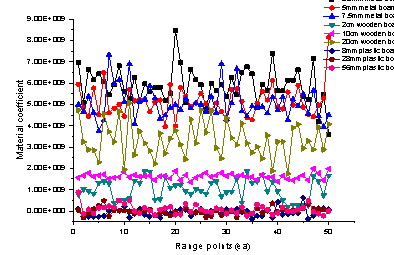
不同障礙物的材質影響分析
2.高燃速藥柱自動整形裝備
針對某型高燃速藥柱整形過程中存在的危險系數高、加工精度不高、藥柱粘彈性高以及生産加工效率低等問題,設計了一套藥柱自動整形設備。該整形設備通過六工位旋轉加工台并運用多軸氣動機械臂對藥柱進行上料與卸料,實現對藥柱加工的高效性;在機械臂關節處采用液壓緩沖器,減少氣缸之間的硬沖擊,實現了對藥柱高精度的抓取,并在藥柱加工工位采用凹形對接接口,利用上下壓闆定位,保證藥柱在加工位上位置精度;為防止藥柱粘彈問題,在設備上采用特制吸盤、頂錐設計、噴塗防粘鍍層,保證藥柱能順利加工,防止粘死。在整形設備上利用多傳感器實時檢測與信号處理技術,實現了多工位信息采集與智能控制的協同作業;搭建人機交互界面實現智能交互;設計監控系統實時反饋狀态參數信息,保證各工位實時監控。
目前高燃速藥柱自動整形設備以投入生産加工,生産效率為人工4倍且産品加工質量高于人工,目前産生累計産值接近2億。



高燃速藥柱自動整形裝備

六工位旋轉加工轉盤


手動操作與調試界面
自動設置界面
3.機器人本體設計與加工
本項目針對海船管道内海洋生物難以清洗的問題,設計了一種三段旋進式管道清洗機器人本體,采用氣動馬達和多個氣缸協同作業方式,能夠實現機器人本體沿DN200管道内壁前進、後退及在任意位置啟停的功能;采用模塊化設計思想對機器人本體進行欠驅動結構與控制系統設計,使其能沿DN200的管道内壁爬升、彎管轉彎。并以該機器人本體為研究對象,分析其在不同應用環境的受力情況,并從理論上對其結構約束參數及關鍵部位運動學進行分析研究,優化機器人本體結構;利用仿真軟件進行仿真驗證與數據分析,進一步優化機器人本體結構參數,提高其豎直爬升、轉彎得動力性能;并試制試驗樣機進行實驗驗證,對管道機器人性能進行進一步優化。最終的管道清洗機器人性能良好,能穩定的在各種狀态管道内平穩運行。
管道機器人模型
機器人系統結構

機器人實驗平台
4.架空高壓直流輸電線路磁懸浮巡檢機器人的關鍵技術研究
為解決架空高壓輸電線巡檢機器人行走打滑以及巡檢效率問題,本項目首次采用了一種基于磁懸浮的巡檢機器人的技術方案:利用高壓直流導線周圍的磁場,實現巡檢機器人的零接觸、無打滑、高效地移動方式。首先從原理上對基于高壓直流磁場的磁懸浮方式進行模型設計,并運用理論和仿真工具對原理的正确性進行了研究和驗證,在此基礎上,設計了磁懸浮原理性最小系統并進行了相關實驗,實驗結果表明基于高壓直流磁場的磁懸浮方式在原理上是正确的,在技術上是可行的;為實現磁懸浮運行方式的巡檢機器人能合理高效地跨越障礙,設計了2種不同的越障機械結構:一種機構由平面連杆機構和絲杠螺母機構組成,具有兩個自由度,通過對兩個原動件控制,使機器人具有開合殼體,翻轉避障的功能。另一種越障機構利用絲杆螺母實現機器人主體的張合運動,從而實現越障;最後對磁懸浮巡檢機器人進行了控制系統設計,完成了系統集成,為實現具有真正實用功能的磁懸浮巡檢機器人打下了基礎。通過本項目的研究,不僅豐富了磁懸浮理論,開創了架空高壓輸電線路巡檢機器人的全新的實現方案,也為輸變電的巡檢和維護工作提供了新的思路,這種基于零接觸、高效的磁懸浮驅動方式的巡檢機器人具備非常廣闊的應用前景。
磁懸浮巡檢機器人結構

磁力懸浮力裝置與實驗

磁力直線牽引原理

磁力直線牽引裝置與實驗
5.大型橋梁車輛載荷動态分布監測系統
橋梁車輛荷載動态分布的實時監測是橋梁健康監測亟待解決的問題,視覺多目标跟蹤方案在車輛空間位置估計和數據關聯等方面還存在瓶頸。引入點雲處理和人工智能技術,提出一種突破技術瓶頸的新思路。首先,預先從不同視角同時采集車輛點雲數據和彩色圖像,通過點雲快速拼接和多維數據融合,獲取車輛彩色點雲及其三維邊界框;然後,在利用深度學習技術檢測出車輛目标及其二維邊界框的基礎上,采用基于候選區域的三維邊界框位姿回歸估計新算法,提高車輛的空間定位能力;最後,根據預測結果,設定車輛彩色點雲空間位姿,構建相機視角的二維虛拟場景,實現車輛遇遮擋後再現情形下的目标匹配。項目研究成果将為多目标跟蹤過程中所遇到的三維定位和數據關聯問題提供解科學依據和技術指引。

車輛荷載分布實時監測系統基本架構
6.3D點雲與2D圖像融合技術研究及其應用
在電子、半導體行業常常需要對PCB和芯片進行幾何量和外觀檢測,傳統的機器視覺方法受限于2D圖像深度信息的缺失,難以正确獲取或識别被檢測對象的真實信息。研究一種3D點雲與2D圖像融合技術,采用多源、多維度數據對目标狀态進行評估。首先通過傳感器标定和拼接等技術将從不同視角采集到的點雲與圖像變換到統一坐标系,再利用點雲灰度圖将其與2D圖像進行配準,根據3D點雲或2D圖像區域的連續性判斷出由于光照條件或遮擋等因素造成的異常區域,實現孔洞填補或陰影消除,經尺度變換後融合成彩色三維點雲。借助深度學習等人工智能手段對融合後的信息進行分析與評估,最終判斷待檢對象的狀态。
5G天線耦合闆外觀檢測
