團隊簡介
77779193永利官网機電裝備智能控制研究團隊,專注于機器人與機電裝備智能控制領域問題,主要研究方向為機器視覺檢測、機器人智能控制與機械裝備設計與優化。
團隊現有教師13人,其中教授2人,副教授6人,湖北省突出貢獻中青年專家1人,楚天學子1人。團隊建有湖北省校企共建激光加工工程技術研究中心、武漢市輕工裝備工程技術研究中心、湖北省軟磁材料及新型電感企校聯合創新中心、湖北省武漢華俄激光工程有限公司研究生工作站等平台;在讀研究生50餘名。
近五年,研究團隊共承擔國家及省部級縱、橫向課題40餘項,到賬經費1300餘萬元,其中包括國家自然科學基金5項、國防科工局項目1項、國家重點研發計劃子課題1項、湖北省重點研發計劃1項及其他省級課題10餘項;團隊發表高水平論文50餘篇,研究成果榮獲湖北省科技進步二等獎1項,國家教學成果二等獎1項,湖北省教學成果一等獎2項,湖北省教學成果二等獎1項。
成員介紹
負責人:
張道德,教授,博士生導師,77779193永利官网院長,湖北省有突出貢獻中青年專家,湖北省委組織部科技創新團隊負責人,武漢市第九批“3551”光谷人才,77779193永利官网“南湖學者”特聘教授;全國光電測量标準化技術委員會委員,中國工程教育認證協會機械類專業認證專家,湖北省機械工程學會教育工作委員會秘書長,湖北省農業工程學會常務理事等。
主要從事機器人智能控制領域的研究工作。近5年主持國家自然科學基金面上項目1項,國防科工局項目1項,國家重點研發計劃子課題1項,湖北省重點研發計劃1項及其他省級課題近10項,主持橫向項目20餘項,項目到賬經費1000餘萬元。發表高水平論文20餘篇,研究成果獲湖北省科技進步二等獎1項,國家教學成果二等獎1項,湖北省教學成果一等獎2項,湖北省教學成果二等獎1項。
成員:

葉旭輝 講師/博士 1989年7月 |
楊智勇 講師/博士 1987年6月 |

張楚鵬 講師/博士 1988年1月 |

商巍 講師/博士 1989年6月 |

魏瓊 副教授/博士 1980年3月 |

李秀紅 副教授/博士 1989年12月 |

張金姣 副教授/碩士 1971年8月 |

李奕 副教授/碩士 1976年8月 |

王君明 副教授/博士 出生年月 |

蘇旭武 副教授/博士 出生年月 |

唐文傑 碩士 出生年月 |

胡新宇 教授/博士 1975年8月 |
主要科研成果及項目
| 序号 |
項目名稱 |
項目來源 |
負責人 |
到帳金額 |
起止年月 |
| 1 |
非結構化野外環境下履帶式機器人自主巡航的自适應調控機制研究 |
國家自然科學基金面上項目 |
張道德 |
58 |
2020 |
| 2 |
基于去偏振光散射的嵌段共聚物/鹽混合物同向微區結構與結晶研究 |
國家自然科學基金青年項目 |
李秀紅 |
24 |
2020 |
| 3 |
運動模糊家蠶微粒子圖像的清晰采集與快速識别方法研究 |
國家自然科學基金面上項目 |
胡新宇 |
60 |
2019 |
| 4 |
基于阻尼/剛度協同優化的氣動伺服動态負載模拟系統控制方法研究 |
國家自然科學基金青年項目 |
魏瓊 |
26 |
2019 |
| 5 |
柔性輸電線纜巡檢機器無動力下坡制動與能量回收方法研究 |
國家自然科學基金青年項目 |
楊智勇 |
21 |
2019 |
| 6 |
風光混合動力自主巡航清漂及垂向擾動控藻技術與裝置 |
國家重點研發計劃子課題 |
張道德 |
37 |
2016 |
| 7 |
未知環境自主協作運輸多機器人平台研究 |
湖北省科技廳重點研發計劃 |
張道德 |
50 |
2020 |
| 8 |
基于視覺反饋的工業機械手運動控制關鍵技術研究 |
武漢市科技支撐計劃項目 |
張道德 |
15 |
2017 |
| 9 |
SP屏蔽罩表面質量視覺檢測系統開發 |
湖北蕊源電子股份有限公司 |
張道德 |
30 |
2020 |
| 10 |
基于視覺定位的三通道自動切換系統 |
中國船舶重工集團公司某研究所 |
張道德 |
24.5 |
2019 |
| 11 |
激光加工裝備智能化關鍵技術研究與開發 |
湖北華俄激光科技有限公司 |
張道德 |
180 |
2018 |
| 12 |
舵機加載台開發 |
中國人民解放軍總參謀部某研究所 |
張道德 |
65.2 |
2017 |
科研成果
1.非結構化履帶機器人系統研制
研究基于多傳感信息融合的SLAM方法,采用移動機器人觀測數據、自身狀态參數及裡程計信息計算提議分布,提高機器人環境特征定位準确性和建圖實時性。
研究多目标狀态約束下的機器人自适應軌迹規劃關鍵性能參數最優匹配方法。結合履帶式機器人非結構化工況特征,建立機器人針對不同工況類型的路徑規劃與跟蹤控制系統動力學理論模型,确保機器人運行軌迹、路徑跟蹤精度及平穩性的最優化。
提出面向多目标的系統動态協調控制方法,提高系統在不同工況下尤其是轉向時的魯棒自适應能力。采用非線性預測控制與動态規劃相結合的能量優化管理方法,提高電動履帶式機器人的續航能力。
|
|
履帶車三維設計圖 |
履帶車實體圖 |
2.風光混合動力自主巡航清漂控藻船
針對目前水庫控藻、清漂技術與裝備效率低、自動化和智能化程度低的問題,重點突破基于水華區域和漂浮物的主動識别的高效自動控藻技術和清漂技術,試制風光混合動力自主巡航清漂及垂向擾動控藻船,具有明顯的環保效益并大量節省人力和燃料消耗成本。研究團隊整合了機電裝備、控藻技術、能源控制方面的研究力量,能夠保障本項目的實施。目前産品在省内河流、湖泊的水面垃圾清理方面得到了一些推廣,取得良好的清漂效果,得到當地水利部門的認可,具有良好的社會公益價值和經濟價值。
|

|
無人船三維設計圖 |
無人船實體照片 |
3.舵機伺服加載測試台
電動舵機加載台主要用于完成飛行控制回路的半實物仿真試驗,也可用于在舵機試驗中加入動态載荷。根據不同飛行剖面所得到的載荷譜可以接口文件的形式來描述、也可以直接與地面飛行仿真計算機實時通訊。已為中國人民解放軍總參某所研制開發雙通道舵機測試台 (Ⅰ期:1000N)及三通道舵機測試台 (Ⅱ期:2000N)各一台。
|

|
1000N電動舵機加載台 |
2000N電動舵機加載台 |
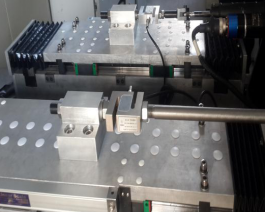
4.基于視覺定位的三通道自動切換系統
本項目采用基于視覺定位的方法實現對大規模數字集成電路測試系統通道接口的全自動切換。以高分辨率相機錄入數字通道接口闆上的接口,結合視覺算法建立機器視覺系統;通過直線電機及導軌建立高精度的XYZ三軸機械系統。兩者通過相應的軟件和硬件組織在一起,建立具備全局接口識别、切換路徑規劃、自動定位對準的通道切換裝置加工與制作平台,使柔性高速電信号測量探針能夠完全自動對準通道接口闆上的接口并進行不同接口之間的切換。
本成果已交付中船重工某研究使用,獲得研究所領導的一緻好評。主要用于代替人工對PCB闆進行智能化高精度測試,也可擴展至芯片瑕疵檢測、自動焊接等應用領域,為芯片智能制造提供技術支撐。
|

|
視覺伺服定位平台 |
探針夾持機構 |
